













Der schwebende Magnet
|
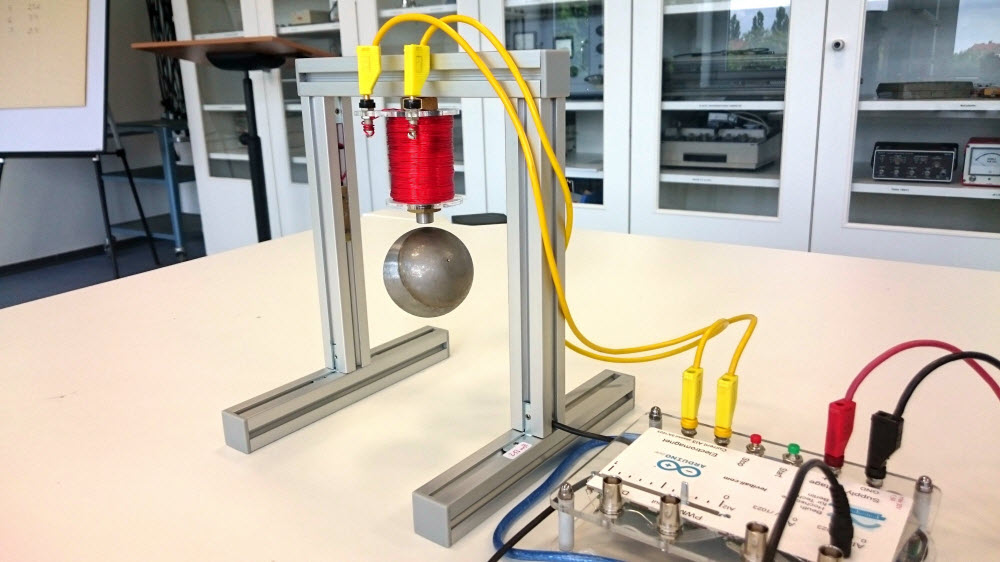
schwebende Kugel, Beuth Hochschule Berlin (http://leviball.com ) Unter dem Stichwort "magnetic levitation" findet man im Internet und auf YouTube ein Reihe von Aufbauten, bei der ein kleiner Magnet oder eine Stahlkugel im elektromagnetischen Feld einer Spule in der Schwebe gehalten werden, z.B.
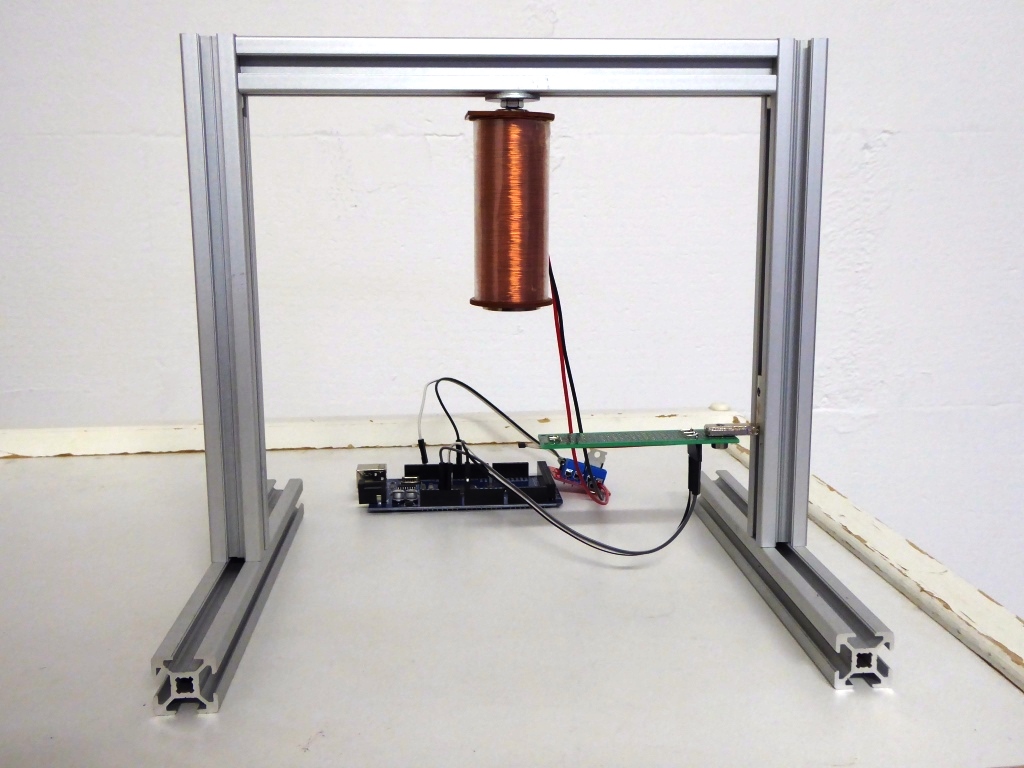
http://www.reidb.net/MagLevitator.html https://mekonik.wordpress.com/2009/03/17/arduino-magnet-levitation/ Eine weitere, noch anspruchsvollere Version ist unter dem Suchwort Magnetic Levitation by Repulsion zu finden. Dort schwebt der Magnet inmitten eines Kraftfeldes das ein Ringmagnet erzeugt und vier Spulen die die Steuerung besorgen. Im folgenden wird ein Aufbauvorschlag mit dem Arduino vorgestellt. Als mechanische Basis kommen 5 Stück ALU profile 20x20x200mm zum Einsatz (ALU Profile 20 B-Typ Nut 6). Die ALU Profile werden mit Winkelverbindern zu einem Gestell verbunden:
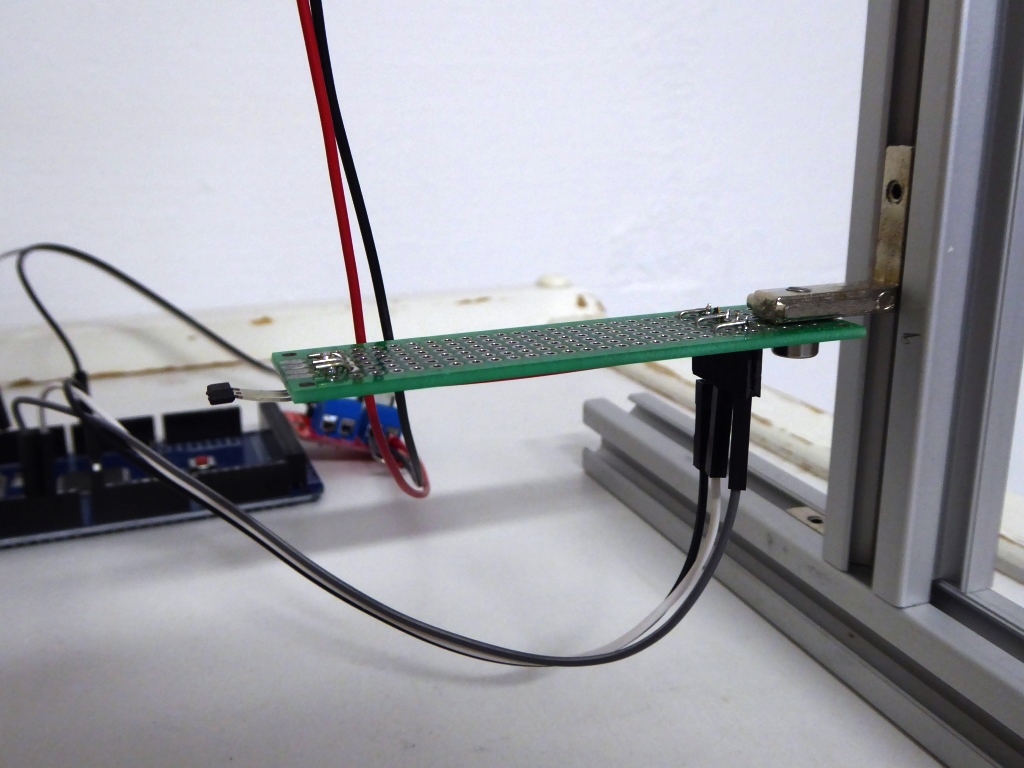
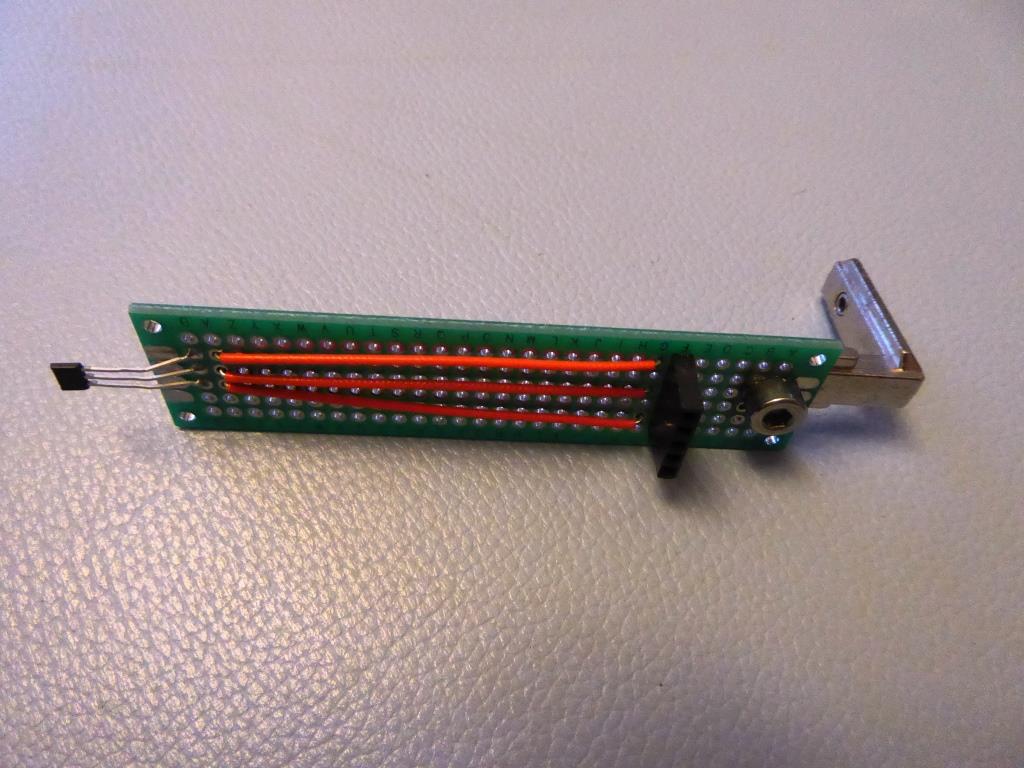
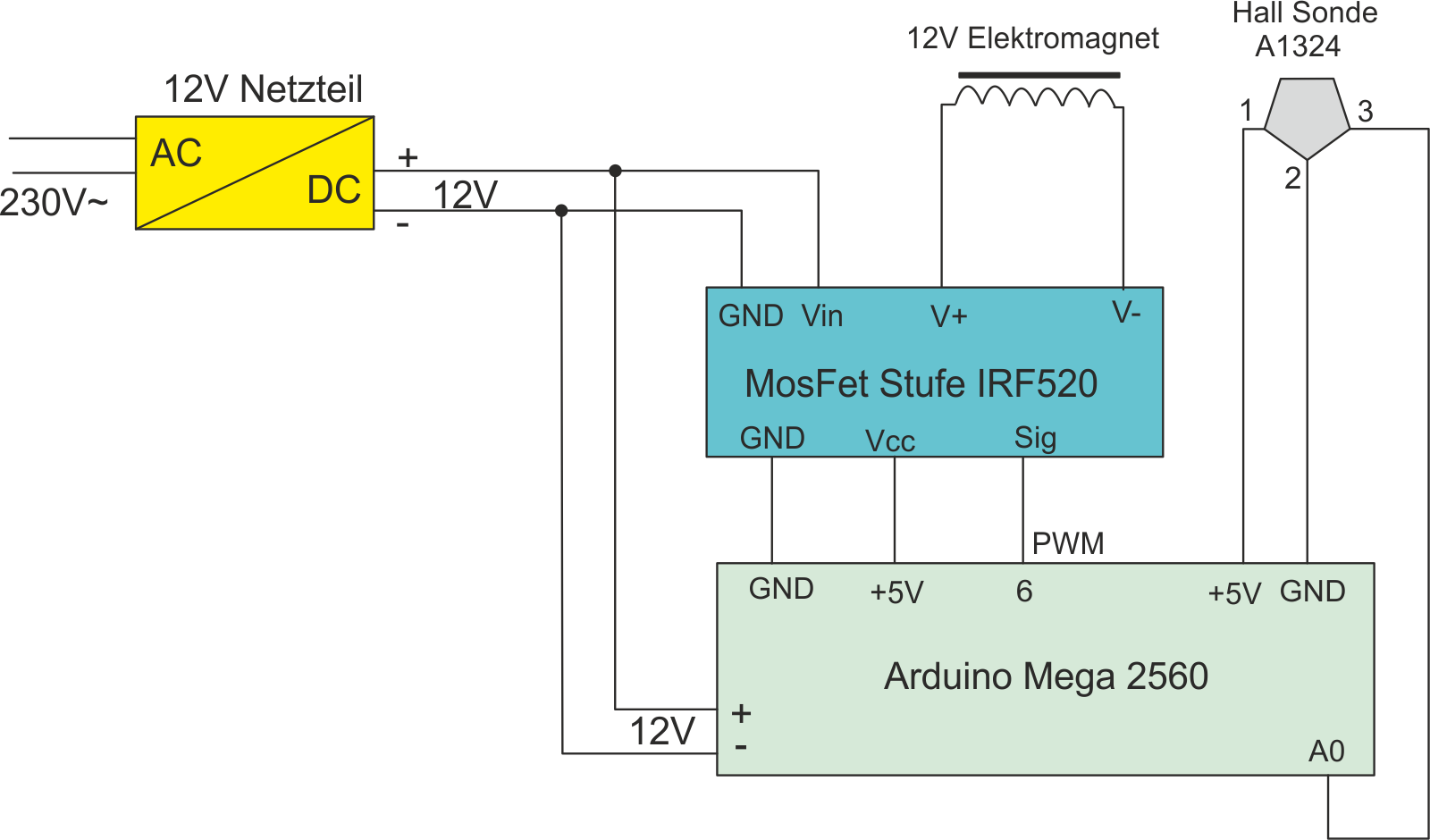
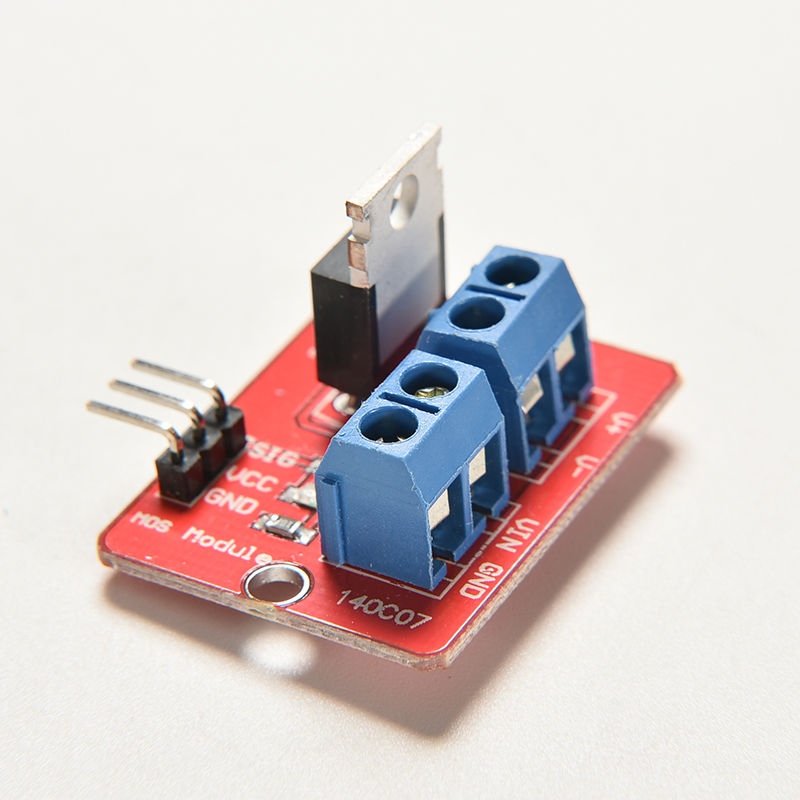
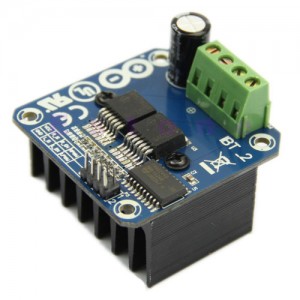
Am oberen Querträger wir der Elektromagnet befestigt. Im vorliegenden Beispiel wurde die Spule aus einem alten Signalrelais verwendet. Es gibt auch fertige Elektromagneten aus chinesischer Produktion bei ebay zu kaufen (siehe Stückliste unten) oder man wickelt 200 .. 300 Windungen Kupferlackdrat der Stärke 0.4mm auf einen Spulenkörper. Die Position des schwebenden Magneten bzw. der Kugel muss berührunglos erfasst werden. Dazu bieten sich zum einen ein Hallsensor oder eine Infrarotlichtschranke mit Fotodioden an. Das Beispiel auf https://makerzone.mathworks.com/resources/magnetically-levitated-ball/ benutzt eine IR Lichtschranke mit der Fotdiode BPW 34FS. Vom elektronischen Schaltungsaufbau ist die Variante mit Hallsensor einfacher zu realisieren (siehe auch Beispiel auf http://www.reidb.net/MagLevitator.html ). Als Hallsensor ist unbedingt der Typ A1324 von Allegro zu verwenden. Er hat eine Empfindlichkeit von 5 mV/G. Andere Hallsensoren bieten nur 1.25mV/G oder 2.5mV/G, was zu niedrig ist. Bei Einsatz des Hallsenors kommt als Schwebkörper nur ein Neodymmagnet in Frage. Die Spule wird über einen MosFet Treiber (siehe Stückliste) mit einem PWM Ausgang des Arduino verbunden. An Stelle des MosFet Treiber kann auch jede H-Brücke, wie sie zur Ansteuerung von DC Motoren benutzt wird, eingesetzt werden. Der Hallsensor wird auf eine kleine Lochrasterplatine gelötet, die mit einem Winkel am ALU Profil befesetigt wird. Der Vorteil dieser Montage ist, dass der Sensor in der Höhe verschoben werden kann.
Montage des Hallsensors auf einer Lochrasterplatine
Stromlaufplan
Um den Magneten in einer stabilen Position zu halten, gibt es zwei Lösungen: Zweipunktregler oder PID Regler. Auf der WEB Seite von Johann Langhofer findet man eine sehr stabile Lösung mittels Zweipunktregelung. Der Programmcode ist für den Arduino UNO / Nano geschrieben. Zur Schwingungsdämpfung wird unter den Magneten eine ALU PLatte gelegt. Deisen Hinweis sollte man auch beim PID Regler anwenden. PID Programmcode mag1.ino . Die Reglerparameter Kp, Ki und Kd müssen in Abhängikeit vom Elektromagneten angepasst werden PID Regler Bibliothek PID_v1.h Stückliste:
|








Copyright (c) 2004, Ingmar Rubin, Alle Rechte vorbehalten.